 |

|
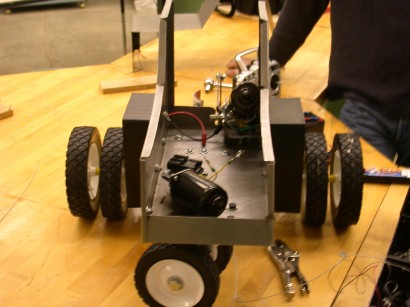
"John Deere" by University of North Dakota, Industrial Technology |
|
Specifications:
|
Robot
Name:
|
"John Deere" |
|
Date
created:
|
2002 |
|
Features:
|
R/C controlled; tractor appearance with gripper. Developed for competitions. |
|
Controller(s):
|
Runner Electronic Speed Controller (4) |
|
Communication:
|
Radio Control RF |
|
Motor:
|
Windshield Wiper |
|
Power:
|
7.2V rechargeable batteries |
|
Drive
Type:
|
Wheeled Differential with Idler |
|
Built
by:
|
University North Dakota |
|
Contact
Info:
|
jeremyagsco@hotmail.com |
 |
|
|
 |
 |
|
|
 |
 |
|
|
 |
 |
|
|
 |